rong>
電動車控制器的電路構成
電動車控制器電路的軟件分析
電動車控制器的改進措施
解決方案:
雙閉環(huán)控制
判斷是否為“過沖”來選擇不同的程序運行
電動車在上坡時速度會減小而電流會增大�����,在由上坡駛入平路或下坡的情況下由于阻力突然減小甚至消失����,而驅動電流仍然較大��,使得速度會快速增大,出現(xiàn)所謂的“過沖”現(xiàn)象�����。這給操作者帶來不適且有一定的危險性�����。為了減輕或消除“過沖”現(xiàn)象��,從硬件和軟件兩方面做出改進���。對于非“過沖”時使用“調速控制”���,通過調整驅動電流,力求使速度達到操作者通過轉把設定的速度�����,并進行雙閉環(huán)控制以克服復雜的路況變化。在“過沖”時采用“定速控制”,依據(jù)速度信號來調整驅動電流����,在設定的時間內使速度保持不變。
調速控制控制器作為電動車的關鍵部件�,其技術日臻成熟,但是仍然有一些問題有待解決��。其中一個普遍的現(xiàn)象就是�����,電動車在上坡時速度減小而電流增大����。在由上坡駛入平路或下坡的情況下由于阻力突然減小甚至消失,而驅動電流仍然較大�����,使得速度會快速增大��,出現(xiàn)所謂的“過沖”現(xiàn)象�����。我們把這種現(xiàn)象叫做上坡“過沖”���。這種情況會給操作者帶來不適且有一定的危險性����。為了減輕或者消除這種現(xiàn)象���,有必要對設計做些改進�����。
1 電路構成
使用無刷電動機的電動自行車控制器主要分為以使用專用控制芯片為核心的純硬件電路控制器(例如以MC33035 為核心的控制器)和以MCU 為核心的控制器(例如以AT89S2051�����、P87LPC767�、STCl2C5410AD 等為核心的控制器)����。采用的直流無刷電機多半是三相電機,電角度有60°和120°兩種���。電機極數(shù)大部分為18 極�,也有16 極�、20 極等。
圖1 是一款以AT89S52 為核心的一個控制器電路框圖�,電動機是電角度為120°直流無刷三相電動機。該電路中單片機接收電源電壓檢測信號���、剎車信號�����、電機電流檢測信號���、轉把(調速)信號�����、電機轉速檢測信號���、轉子位置檢測信號等,判斷電動機轉速是否符合要求�����、三相繞組A�����、B��、C 與位置信號a、b�、c 之間的對應關系是否正確等,動態(tài)的輸出PWM 形式的控制信號�����,控制相應的功率驅動管的導通或關斷�,控制電動機的起動或停止�、加速或減速等,并輸出各種指示信號����,如剎車信號、左轉/右轉信號�����、欠壓報警信號等�。對于采用MCU 為核心的控制器,一般的是以軟件編程來實現(xiàn)����。
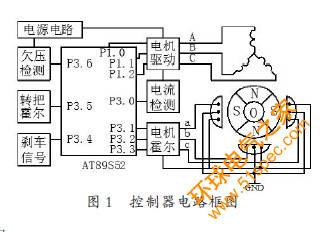
1)轉把的形式、信號特征:轉把(轉速)信號是操作者發(fā)出的速度控制指令信號�。此電動自行車使用“霍耳轉把”。以5V 供電、正把�����、輸出信號為1.1~4.2V����。轉動轉把,改變了霍耳元件周圍的磁場強度��,也就改變了霍耳轉把的輸出電壓��。
2)閘把的形式����、剎車信號特征:電動車閘把上有閘把位置傳感元件,在捏剎車把動作時�����,將剎車信號傳給控制器�����,控制器接收到剎車信號后�����,立即停止對電機的供電。
[page]
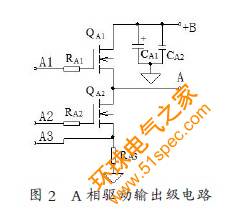
3)直流無刷電機的驅動控制:參見圖1�����,此電路采用三相無刷直流電機�����。3 個霍爾位置傳感器的空間間距為120o�,輸出信號a�����、b����、c最終送給單片機作為轉子位置檢測信號及測速信號。其中A 相末級電路如圖2 所示�����,在驅動電路中設置了電流檢測�����。單片機根據(jù)霍爾轉速信號和電流檢測信號,經過分析判斷�,輸出正確的PWM 控制信號給相應的線圈通電,從而控制電動機的起動��、停止及轉速等�。
4)欠壓保護和過流保護:當電池電壓降低到控制器設定值以下時,單片機停止PWM 信號的輸出�,以保護電池不至于在低電壓情況下放電。
限流保護(或過流保護)電路對控制器輸出的最大電流進行限制���,以保護電池��、控制器����、電動機等不會出現(xiàn)允許范圍以上的電流����。
一個最基本的電動車用無刷電機控制器所需要實現(xiàn)的功能一般包括欠壓保護、過流保護�����、調速、剎車�����、斷相保護��、軟啟動等���,近年來還有一些實用且流行的功能如定速巡航�、ABS 剎車再生制動�、1:1 助力等等。
2 軟件分析
初始化之后�����,接著檢測電池電壓以判斷是否低電壓���,如果低電壓,將起動欠壓保護�。如果電池電壓正常,接著接收轉把信號以判斷操作者設定的速度大小�����,調整PWM 脈沖的寬度以調整電動機速度。電動機通電后��,控制器接收電流檢測信號����、霍爾轉速及相序信號、剎車信號等�,判斷電動機是否正常運轉、電路是否正常工作����,動態(tài)輸出PWM 驅動控制信號,調整車速使之逐漸達到操作者設定的速度��。在有異常時采取保護措施直至斷開電源�。
3 問題和改進
1)問題:單片機接收轉速信號和電流檢測信號,根據(jù)轉把速度信號輸出PWM 控制信號去調整電機轉速和限流����,好像能夠實現(xiàn)速度的穩(wěn)定控制。實際上���,當轉把位置確定后����,在上坡時速度會減小而電流會增大,且坡度越陡速度會越慢而電流會越大�����;當上坡結束轉為平路或轉為下坡時���,往往會出現(xiàn)車速突然地快速增大的現(xiàn)象�。我們將這種現(xiàn)象叫做“過沖”��。這種情況每次都會在加速了一段之后才來得及調整轉把�,使得操作者對車速難以把握,而且上坡之后速度快速增大具有一定的危險性�����。
2)原因分析:上坡時由于阻力的作用���,速度難以提升到用戶設定的值甚至越來越慢。但在上坡轉為水平路面或下坡時���,單片機會依然根據(jù)轉把速度指令來調整PWM 控制信號��,力求使車速達到操作者設定的數(shù)值�����,電機驅動電流依然維持在較大的數(shù)值上���;由于轉為水平路面或下坡時阻力突然減?����。ㄉ踔林亓ψ?yōu)閯恿Γ?���,車速便會突然的快速增大?br/>
3)改進措施:一是要求用戶在上坡時盡可能的使用低速���,使用腳踏助力���;二是對硬件電路做些改進,在“過沖”時將驅動電流立即降下來��;三是對軟件進行改進��。對于MCU 為核心的控制器��,增加對電流增減和速度增減的判斷。在“過沖”時不執(zhí)行轉把速度信號指令而改為“定速控制”���。
[page]
根據(jù)上述思路將軟件控制流程進行修改�。如圖3 所示�����。將“速度增大而電流不增”作為“過沖”的判斷依據(jù)�����?����?刂破鞒掷m(xù)檢測速度變化和電流變化�����,再經過判斷����,如果不屬于“過沖”的情況,則執(zhí)行子程序“調速控制”����。這種情況下控制器檢測轉把電壓值來調整PWM,增大或減小電流值使速度變化直至達到操作者通過轉把設定的速度值�����。
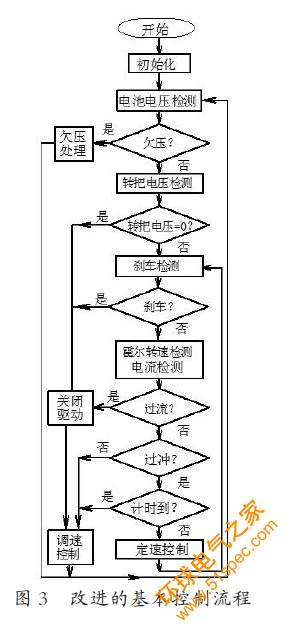
如果屬于“過沖”的情況���,則執(zhí)行子程序“定速控制”�����。在這種情況下���,控制器完全根據(jù)對速度的檢測來調整PWM,力求使車速保持不變��。在“過沖”時電流會迅速減小而保持原有的速度不變���。在定速控制期間要持續(xù)的檢測速度和電流����,在兩種情況下會結束“定速控制”而返回去檢測轉把電壓并調速:一種情況是車子已結束“過沖”�����,經過判斷已退出“過沖”狀態(tài);另一種情況是達到了預先設定的“過沖定速控制時間”����。這個時間長度為1~3 秒即可。為了保證“過沖”期間的及時剎車����,在“定速控制”期要進行剎車檢測。
一些其它問題也值得注意���。例如:很多電動車的欠壓保護有效性不夠好���。有些控制器在電壓低于設定值時就關閉的電源,而當電壓升起來超過該設定值時又打開電源���,這容易使用戶利用蓄電池的回升電壓工作��,從而造成蓄電池過放電����。為了防范這個問題��,欠壓比較硬件設計成電壓滯環(huán)自鎖比較。欠壓保護分為兩級���,第一級保護時輸出欠壓報警信號、限制電流的大小�。第二級保護是完全關閉電動機驅動和照明。本例中由“欠壓處理”子程序完成判斷和處理����。
再如,很多控制器只有單閉環(huán)控制�����,性能不佳���。在路面情況變化大的時候��,電流變化很大���。這對電機和電池都是不利的。在硬件方面應改用雙閉環(huán)控制電路�,在軟件方面應該增加對具體情況的判斷。對于雙閉環(huán)控制系統(tǒng)(無刷:轉速/電流雙閉環(huán)��,有刷:電壓/電流雙閉環(huán))來說,由于電流環(huán)存在��,可以對電流大小進行限制以及限制電流的變化速度����,即可以保護電動車在處于各種正常運行情況下最大電流輸出值不會超出設定的電流限幅值, 還可以使電機實現(xiàn)最理想的啟動過程和加速過程����、以及平穩(wěn)的電流變化;速度閉環(huán)控制則可以限制速度的快速變化(現(xiàn)在的電動自行車不宜追求快速起動性能)����。對于單片機控制器來說,可以同時在軟件中進行改進���。本例中在子程序“調速控制”中設置電流變化速率的限制����,不允許電流的快速變化�。
為了避免在子程序“調速控制”和“定速控制”之間的頻繁切換,在“定速控制”中設置“過沖檢測有效時間”��。比如0.3 秒����,在這個時間內不看做“過沖”而繼續(xù)運行“定速控制”�����。
4 結束語
本文對于電動車行駛中“過沖”現(xiàn)象從硬件和軟件兩方面入手進行了改進����。對于硬件的改進���,應該使用雙閉環(huán)控制。對于軟件的改進����,通過判斷是否為“過沖”來選擇不同的程序運行。對于“過沖”情況使用“定速控制”����,對于非“過沖”情況,使用“調速控制”�。關于“過沖恒速控制時間”、“過沖檢測有效時間”的合理數(shù)值還需進一步研究����。



